MATSim Carrier viewer
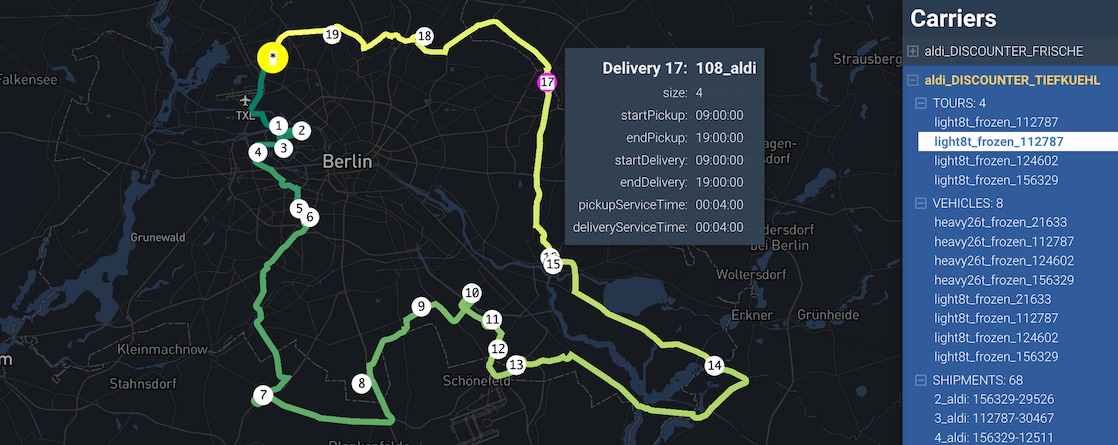 MATSim carrier plans
MATSim carrier plans
Usage
A file named viz-carrier*.yaml must be present in working folder. Each yaml/yml file matching that pattern will produce a separate carrier visualization.
viz-carrier-example.yml
title: 'Grocery delivery carriers'
description: 'Berlin open scenario'
network: output_network.json.gz # slower: output_network.json.gz
carriers: output_carriers.xml.gz
center: [13.4, 52.5]
YAML fields explained
title: title of the panel
description: brief text description
network: Generally this should be the output_network.xml.gz filename that was used for the logistics run
carriers: The carrier file output, usually of the form *output_carriers.xml.gz
center: Use this to force the map center point. [long,lat]
zoom: zoom level 5-20